 Fraunhofer Institute for Ceramic Technologies and Systems IKTS
Fraunhofer Institute for Ceramic Technologies and Systems IKTS
Increasing the use of public transport is one component of the desired mobility transformation. Attractive local public transport is based on reliable vehicles, such as trams. Random surveys of the condition of the rail and track, as well as scheduled maintenance, lead to inaccurate information and cause considerable costs. If this information were collected automatically with standardized sensors available in every streetcar and these data volumes were processed using machine learning, this would enable targeted fleet deployment and reduced follow-up maintenance costs.
The three-year LRVTwin project aims to create a best-practice example of a digitized tram fleet with higher availability and optimized maintenance. Sensors on 20 trams in Dresden and Leipzig, as well as on a specially equipped measuring tram in Leipzig, will determine the required data. Suitable correlation methods and analysis procedures are being developed for their evaluation. The findings on the condition of tram and track will then be visualized.
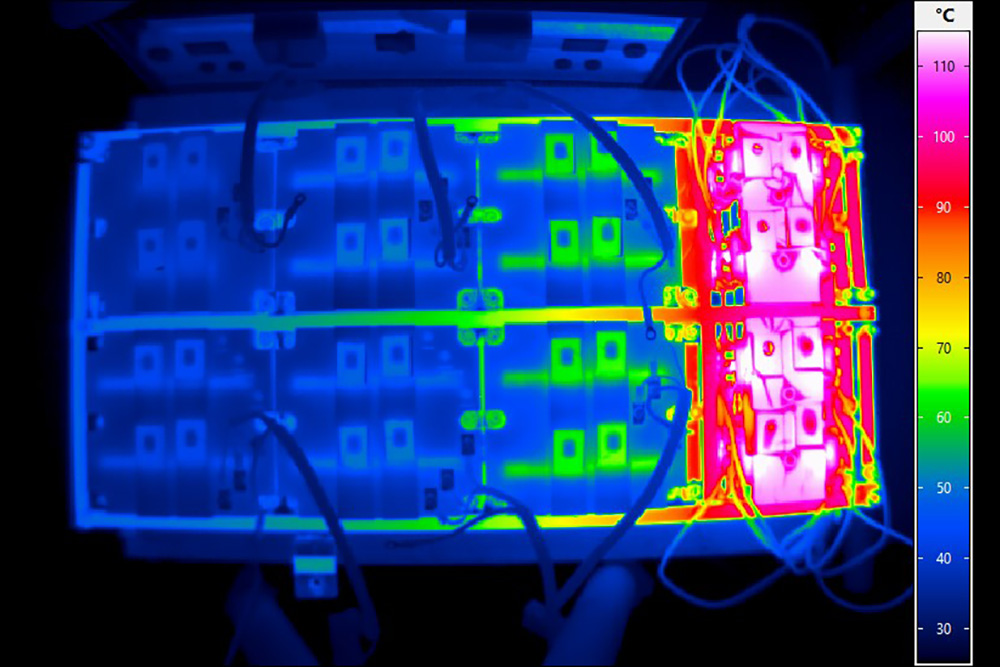
Within the project, IKTS investigates damage mechanisms on power converters. The collected data will be analyzed and translated into a data-driven model for predicting failures. In parallel, lifetime models on accelerated aging will be created in the laboratory. Based on the analytical relationships and numerical approaches in physical models to damage and wear events, the accuracy of the data-driven model can be increased. This can then be used to optimize maintenance planning. The resulting reduced costs can be passed on to the customer, which, in conjunction with improved availability, increases the attractiveness of public transport.
At the end of the project, rail and network status will be available digitally and will be extended from individual trams to a digital fleet. In the future, these models will also be used for fleets in other cities.
Funding: mFUND of the German Federal Ministry for Digital and Transport
Project timeframe: January 1, 2022 – December 31, 2024
Project partners: Technische Universität Dresden, Leipziger Verkehrsbetriebe GmbH, Dresdner Verkehrsbetriebe AG, Robotron Datenbank-Software GmbH, IFTEC GmbH & Co. KG, SDS Schwingungs Diagnose Service GmbH, Estino GmbH, Leichtbau-Zentrum Sachsen GmbH
